
ETL 1110-1-175
30 Jun 97
7-5. Triangulation
It is seen that the weight assigned to a point is pro-
portional to the area of the triangle opposite the
a. To compute this predictor, the region R is
point.
partitioned into what are referred to as Voronoi
c. Computation of this predictor is slower
locations closer to measurement location xi than to
than computation of those in sections 7-2, 7-3, and
any other measurement location. If any two poly-
7-4. The predictor is an exact interpolator, and the
gons, Vi and Vj, share a common boundary, xi and
surface produced is continuous, but not differen-
xj are joined with a straight line. The collection of
tiable at the edges of the triangulation.
all such lines defines what is known as the
Delaunay triangulation. There will be one such
triangle containing the prediction location x0; the
7-6. Splines
vertices of this triangle, which are measurement
locations, are labelled xj, xk, and x1. The spatial
a. In spline modeling, the measurements are
prediction at x0 will be the planar interpolant
interpolated using combinations of certain so-called
basis functions. These basis functions are usually
(x1, z(x1)). Joining x0 and xj, xk, and x1, three sub-
taken to be piecewise polynomials of a certain
triangles are formed. The weights wi are (Cressie
degree, say k, which is determined by the user. The
1991)
coefficients of these polynomials are chosen so that
the function values and the first k-1 derivatives
Ai
agree at the locations where they join. The larger k
wi =
, i = j, k, or l
is, the smoother will be the prediction surface.
Aj % Ak % Al
(7-5)
Spline techniques are often applied in a non-
stochastic framework; in such a context they
0,
otherwise
represent a way of fitting a surface with certain
where Ai is the area of the subtriangle opposite
smoothness properties to measurements at a set of
vertex xi.
locations with no explicit consideration of statisti-
cal optimality. There is, however, a considerable
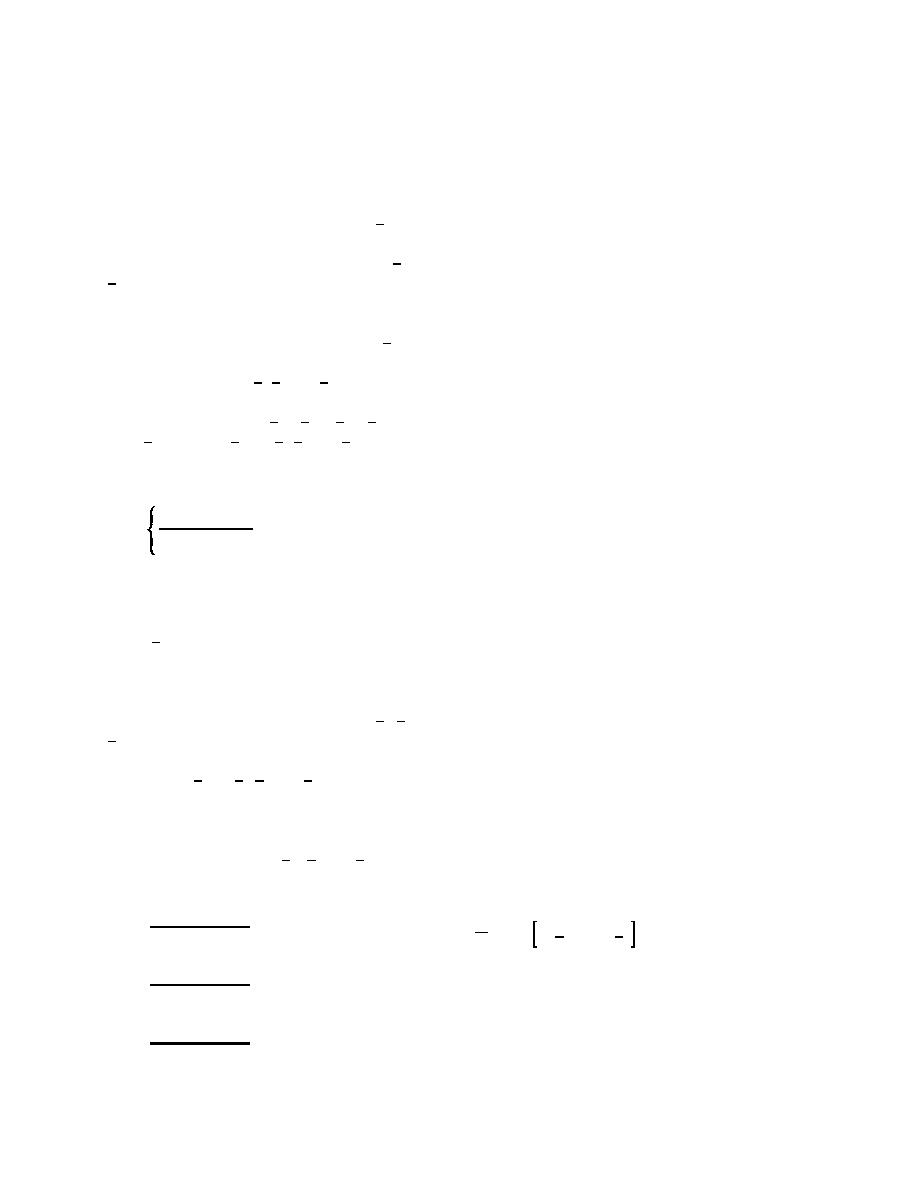
b. These definitions are illustrated in Fig-
body of work in which this technique is applied in a
stochastic setting. Splines may be used, for
ure 7-1. In this figure, the dashed lines depict the
example, in nonparametric regression estimation
x6, and the solid lines define the Delaunay triangu-
problems (Wegman and Wright 1983).
lation. Vertices of the triangle containing the pre-
b. A typical approach to formulating a spline
diction point x0 are x1, x5, and x6, and dotted lines
problem is to pose it as an optimization problem.
show the subtriangles defining the associated area
A1, A5, A6. For this example, j, k, and l in the
In one special case, it is assumed that the first two
derivatives of the prediction surface exist, which is
general Equation 7-5 are 1, 5, and 6, so the
weights assigned to points x1, x5, and x6 are,
a way of imposing a certain degree of smoothness,
and that the spline function minimizes
respectively,
A1
j z (xi) & z (xi) % 0 Q
n
1
w1 =
~
,
2
(7-7)
A1 % A5 % A6
n i=1
A5
w5 =
where Q is a term that depends on the first two
, and
(7-6)
A1 % A5 % A6
derivatives of the predictor surface. The parame-
ter 0 is a nonnegative number that needs to be
A6
w6 =
A1 % A5 % A6
7-3


 Previous Page
Previous Page
